Dr Aparna Deshpande
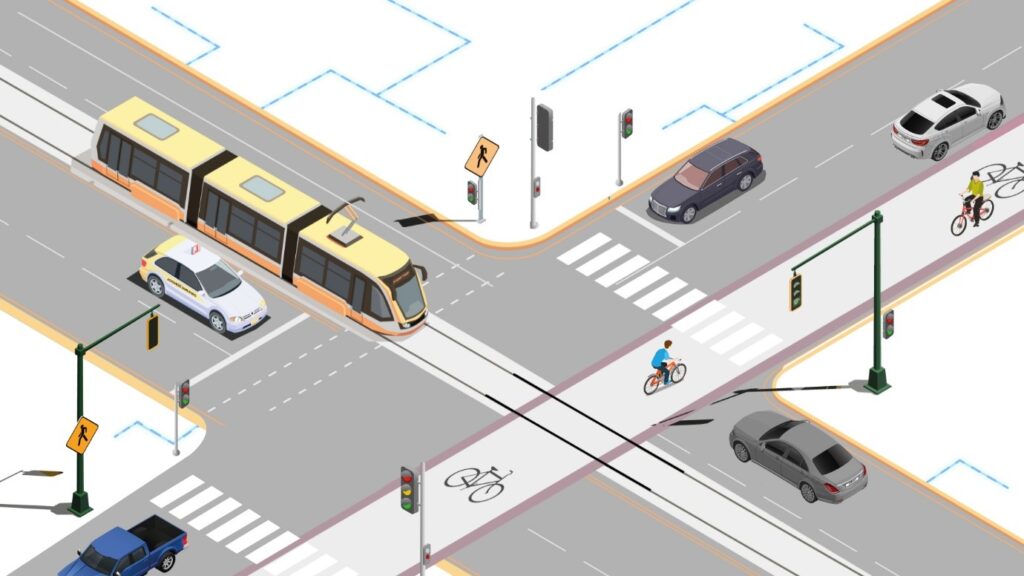
How about foreseeing a day where your daily drive to work place is channelized in a way so that you don’t have to pull on a red light. In a recent study, researcher from MIT have developed a machine-learning approach which ensures a smooth flowing traffic of autonomous vehicles at signalized intersection. If any vehicle stops at red light it adds up to the fuel consumption and green-house gas emissions as well. One can time the trip so that you arrive on any intersection when the light is green.
Simulations were performed in order to control a cluster of autonomous vehicles in a way that keeps traffic flowing smoothly. Dealing with intersection algorithm is intricate as it gives rise various different scenarios like the number of lanes, how the signals operate, the number of vehicles and their speeds, the presence of pedestrians and cyclists, etc says the lead author of the study Vindula Jayawardana, a graduate student in Laboratory for Information and Decision Systems (LIDS) and the Department of Electrical Engineering and Computer Science.
The mundane approach of mathematical models for resolving traffic uncertainties doesn’t seem to be fruitful as the traffic patterns are messy worldwide. In a new study, MIT researchers demonstrate a machine-learning approach that can learn to control a fleet of autonomous vehicles as they approach and travel through a signalized intersection in a way that keeps traffic flowing smoothly. Using simulations, they found that their approach reduces fuel consumption and emissions while improving average vehicle speed. The technique gets the best results if all cars on the road are autonomous, but even if only 25 percent use their control algorithm, it still leads to substantial fuel and emissions benefits. Typical approaches for tackling intersection control problems use mathematical models to solve one simple, ideal intersection. That looks good on paper, but likely won’t hold up in the real world, where traffic patterns are often about as messy as they come. Jayawardana et al. have come up with a new technique “deep reinforcement learning “where the controlled alogorithms learns to make a sequence of decisions.
The key aspects of reinforcement learning is it leverages assumptions learned by a neural network to find shortcuts to good sequences, even if there are billions of possibilities. For solving a long horizon problem, the control algorithm accelerates around 500 instructions to an autonomous vehicle over a longer time duration. The get the sequence right it has performed dual operation of mitigating emissions and getting to the intersection at a good speed says a senior professor Cathy Wu who leads the study. The researcher team established an approach known as reward shaping which gives the system some domain knowledge which enables it to learn on its own. The system was penalized every time when it came to a complete stop, so that it avoids this action. The control algorithm connects with vehicles, which communicates with upcoming traffic lights to receive signal phase and timing information and observe the surrounding traffic scenario. The control algorithm tells each vehicle how to accelerate and decelerate. This technique will result in sustainable mobility. Recognizing facts of interference that are small changes to the system but have significant impact is something that needs to be addressed says the research team with a hope of providing a greener solution to the current traffic scenarios
Please see the following news Source(s) and original reference(s) therein: https://www.sciencedaily.com/releases/2022/05/220518113851.htm